U osnovi MACHINE VISION (MV) je jednostavna
tehnologija, sastavljena od kamera i računala. U najosnovnijem obliku to
je analiza televizijske slike pomoću računala. Taj koncept je u osnovi
povezan sa područjem snimanja.
Drugim riječima, MV se može opisati
kao zamjena ljudskog vizuelnog osijetila video-kamerom i računalom u svrhu
obavljanja zadatka i ostvarivanje cilja u teškim, napornim i opasnim uvijetima
za ljude.
Može se koristiti u svim procesima
gdje su potrebna vizuelna ispitivanja ili tamo gdje se koristi vizuelna
informacija. Koristi se da locira, ispituje, broji, mjeri, identificira
i provjerava, te donosi odluku bez ljudske intervencije.
MV je na neki način povratna veza sistemu,
kako bi vratio podatak o kvaliteti proizvoda za korekciju pojedinih parametara
proizvodnje o kojima ovisi kvaliteta proizvoda.
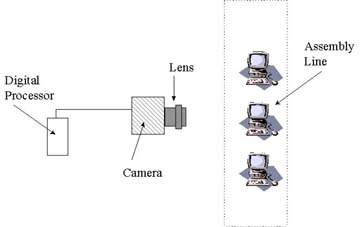
Na slici 1 prikazani su tipični MV sustavi koji nadziru proizvodnju:
Povratak na SADRŽAJ
1. kamera,
2. optički sustav,
3. rasvijeta,
4. sklopovi za prihvat i pretvorbu slike,
5. programi.
Prikaz osnovne konfiguracije MV sustava dan je na slici 2 :
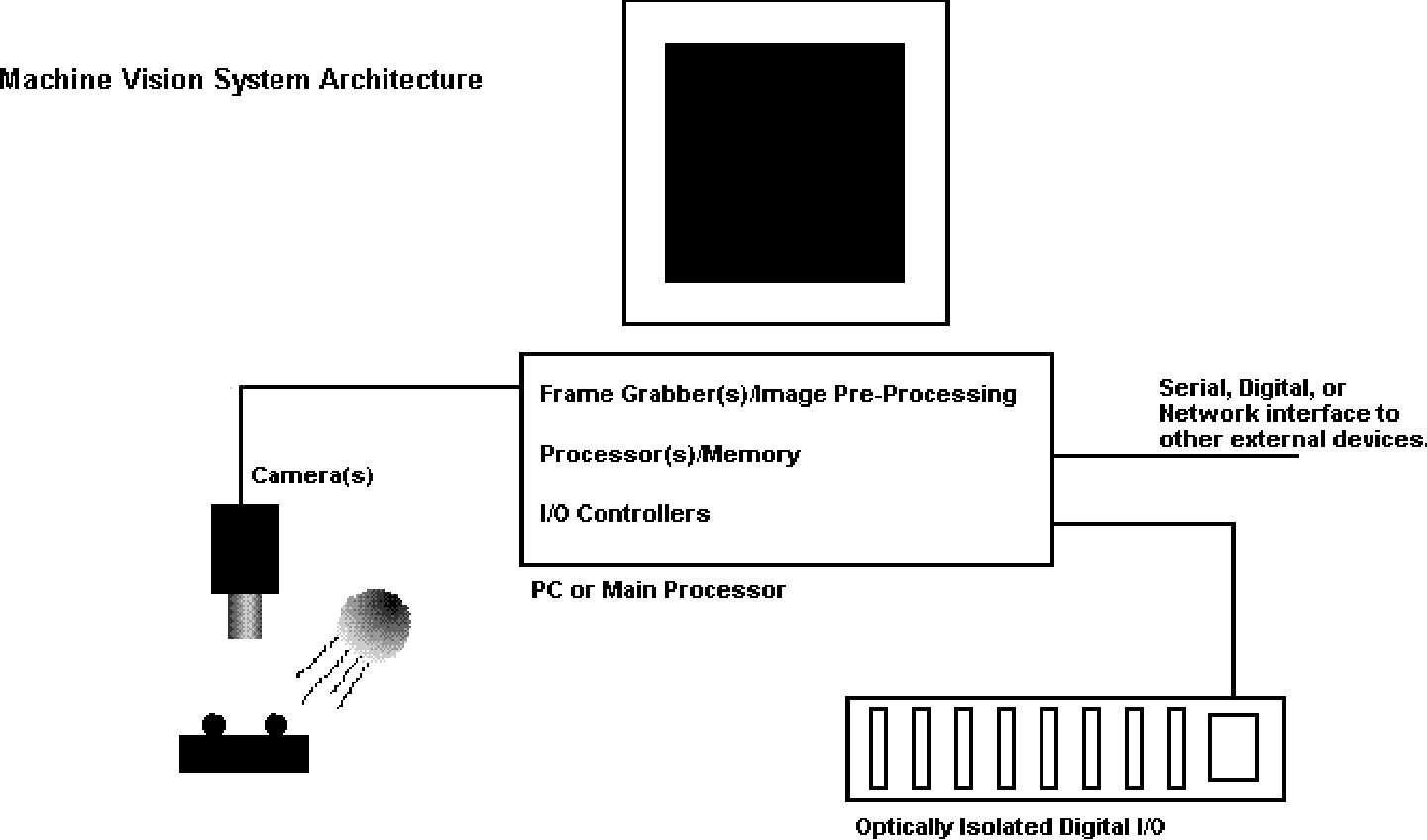
Kamera
Kamera služi kako bi događanja koja
pratimo (informacije koje su nam potrebne) pretvorila u električke signale
za daljnu obradu.
Najčešće, u današnje vrijeme su to
kamere sa CCD (Charge Coupled Device) čipom kao "osjetilom vida", koji
predstavlja senzor u MV sistemu.
Senzor ima konačan broj diskretnih
detektora i to ograničava širinu (veličinu) podatkovnih elemenata koji
se mogu prenijeti. U tipično televizijskom MV sistemu tipični broj veličine
podatkovnih elemenata je oko 400÷500 horizontalno i 400÷500 vertkalno.
S time smo već na samom ulazu, u početku, sasjekli dio informacija.
U MV sistemima se danas koriste, s
obzirom na spektar slike infracrvene (IR) kamere ili kamere za vidljivo
područje.
Po načinu skeniranja slike imamo kamere
s progresivnim skeniranjem i sa linearnim skeniranjem. Obzirom na signale
koje daju na svom izlazu, imamo analogne i digitalne kamere.
Infracrveno -
Infracrvene kamrem su tipično korištene u primjenama toplinskog mapiranja.
One mogu
Vidljivo područje mogu biti upotrebljene u
primjenama gdje je vidljivo svijetlo ambijenta varaira i može biti kritično
to da bilo koja
analiza nije ne oštećena promjenama svijetla okoline. Infracrvene kamere
su skuplje i nisu potrebne u većini MV slikovnim
aplikacijama.
Progresivno - Kamera s isprepletenim,
skaniranjem su više isplative kod stacijonarnih i sporopomičućivh primjena.
Kod primjena gdje je isprepleteno
potrebna brza i nagla promjena, posebno gdje je korištena strobo osvijetljenje
za rasvijetu, je preporučljivo koristiti skeniranje
progresivno skenirane (neisprepletenim) kamere sa visoko krajnim frame
graber (slikovnim otipkivačem) koji podržavaju te
kamere.
Analogne - Digitalne kamere imaju višu rezoluciju
od analognih i mogo prenijeti podatke s većim omjerom od analognih.
digitalne
Digital Area cam. - Digitalne linisko-skanirane kamere
su tipično korištene za jakovelike brzine primjena gdje se objekt
pomiče u jednom Digitalno Linisko
smijeru prolazeći liniju snimanja kamere. Ako su korištene Digital
Area kamera u primjenama visoke brzine prolaska Skenirane
predmeta, one će morat biti povezana s strobo osvijetljenjem da zamrzne
sliku kako nebi došlo do zamućenja.
Optički
sustav
Slika koja je prikupljena kamerom je
to kvalitetnija, koliko je to i optički sustav bolji koji je korišten.
Optički sustav se sastoji od skupa
leća kojima kadar želimo prilagoditi za dobivanje što bolje, oštrije, jasnije
i kvalitetnije slike. Kvaliteta leća utječe na kvalitetu slike, a ovisno
o optičkoj kvaliteti leće kreće se i cijena .
Izobličenja i aberacije mogu utjecati
na količinu značajki u prostoru slike (Vignetting). Povećanje leća
mora biti u skladu sa primjenama. Slika objekta mora prekriti slikovni
prostor senzora što je moguće više. Tako imamo približne relacije
između veličine vidljivog polja leće, udaljenost objekta, i žarišne daljine
leće (fokusa), što ovisi o CCD formatu:
1/3” format
1/2” format
2/3” format
H=(4.3*D)/F
H=(6.4*D)/F
H=(8.8*D)/F
V=(3.2*D)/F
V=(4.8*D)/F
V=(6.4*D)/F
F=(4.3*D)/H
F=(6.4*D)/H
F=(8.8*D)/F
F=(3.2*D)/V
F=(4.8*D)/V
F=(6.4*D)/V
Pri tome su: H = horizontalna
širina polja vidljivosti u milimetrima
V = vertikalna visina polja vidljivosti u milimetrima
D = udaljenost do objekta u milimetrima
F = fokus, žarišna duljina leće u milimetrima
Fokus leće i otvor blende mora
biti otimizirani da održavaju dubinu polja koji je povezan sa objektom.
Osnovni odabir za leće su f-stop opseg
(otvor blende), žarišna duljina leće, fiksno povećanje (zoom) i tip
(telekonvertorske ili konvencionalne).
F-stop opseg Što manji minimalni otvor blende
(f-stop) to više svijetla će proći kroz kameru, omogućavajući pravilan
rad pri slabom svijetlu.
Žarišne leće One definiraju slikovno područje praćenja kamere koje će biti vidljivo na danoj udaljenosti od kamere.
Zoom - Zum leće su više fleksibilnije od leća
s fiksnim pojačanjem, ali propuštaju manje svijetla kroz njih.
Fiksne
Telecentriske - Telecentriske leće reduciraju
kut pogleda greške (viewing angle error) i magnification error common konvencijonalnim
Konvencijonalne lećama, posebno po rubovima slike.
Osvijetljenje
Osvijetljenje je jako bitno za ispravni
rad MV sistema. Kvalitetno osvijetljenje je potrebno za ostvarenje dovoljno
oštre reflektirane slike objekta. Osvijetljenje mora biti uniformno distribuirano
po uobjektu. Ne-uniformno osvijetljenje uzrokuje mutnu sliku već na samom
ulazu u kameru.
Kao i u slučaju fotografije trikovi
osvijetljenja mogu biti upotrebljeni da poboljšaju određene značajke nadziranog
kadra. Npr. moguće je da sjena sadrži informaciju o visokom kontrastu koja
može biti upotrebljena za donošenje odluke o kadru. Zbog toga danas imamo
više vrsta osvijetljenja kako bi odabrali najpogodnije za specifičnu upotrebu.
Tako imamo direktno osvijetljenje, difuzno osvijetljenje (daje najuniformniju
raspodijelu svijetla), pozadinsko (koristi se za otkrivanje oblika i omogućavanje
dimenzionalnih mjerenja) i stroboskopsko (služi nam pri snimanju kod velikih
brzina i brzih promjena, tako da zamrzuje sliku da se izbjegnu zamućenja).
Direktno svijetlo u tu kategoriju spadaju visokotlačne
natrijeve i kvarc halogene. Ovo jako usmjereni izvor svijetlosti može prouzrokovati
jake sijene i neće stvoriti jednoiku raspodjelu svijetla.
Difuzno svijetlo ono daje najjednolikiju raspodijelu svijetla.
Pozadinsko svijetlo se koristi za više pouzdano otkrivanje oblika i omogućavanje dimenzionalnih mjerenja.
Stroboskopsko su potrebna kada je korištena “area”
kamera u jako brzim primjenama. Strobo svijetlo zamrzuje sliku kako bi
se
izbjegla zamućenja.
Link
na Vodič osvijetljenja Dolan-Jenner
Sklopovi
za prihvat i pretvorbu slike
Image acquisition hardware ili frame grabber nam je potreban
da bi sliku, koja se dovede iz kamere prenese u PC, pri PC-baziranim MV
sistemom, za daljnju obradu. Za analogne kamere njihov signal se
najprije mora konvertrati u digitalni format, digitalizirati, pomoću digitalizatora
koji se na novijim karticama nalazi na njima. Kamere koje imaju digitalni
izlaz one informaciju o slici odmah šalju u memoriju ili/i na video-karticu.
Za digitalne kamere korištene su digitalne kartice za prikupljanje slika,
a podaci o slici preneseni od kamere do računala su digitalnog formata.
Digitalne kamere imaju prednost u niskom šumu,
većem omjeru slikovnog otipkavanja,
i imaju veću rezoluciju. Digitalne kamere
i sklopovi za prihvat digitalne slike su skuplji od analognih sistema,
pogotovo kod visokorezolucijskih digitalnih kamera. Ali dakako, razlika
u cijeni između analognog i digitalnog sistema konstantno opada. Mnogo
suvremenih kartica za prihvat i pretvorbu
slike su dostupne u PCI sabriničkom formatu za brži podatkovni transfer
do memorije i/ili displeya. Korištene tehnologije,
kao sabirničko upravljanje (bus mastering) i DirectDraw
zajedno povećavaju veći transferomjer sa manjim
opterećenjem CPU-a.
Ostale značajke kartica za prihvat i pretvorbu slike za PC-baziranaMV
uključuju i sljedeće:
- podržavanje više kamera - Neke napredne slikovno prikupljačke kartice podržavaju prikupljanje slika od više kameraProgrami
simultano i neovisno. Koriste se kod složenijih i kompleksnijih MV sistema za jeftiniju varijantu.
- okidački i strobo mod – Slikovno prikupljačke kartice tipično podržavaju na kartici vanjsko-okidačku mogućnost za vremensko
usklađivanje slikovnog prikupljanja. Neke kartice podržavaju konfiguriranje strobo kontrole svijetla i
sinkronizma. Ove osobine traže i kompatibilan primjenjem program za to korištenje.
-konfigurabilni digitalni U/I – Neke slikovno prikupljačke kartice podržavaju konfiguriranje U/I linija za međudjelovanje sa ostalim
uređajima i kontrolerima. Npr., različite izlazne linije mogu biti postavljene visoko ili nisko u različita
vremena tokom nekog ispitnog ciklusa da pokazuje rezultat nekog ispitivanja (kraj ciklusa, ispitivanje je
prošlo, ispitivanje nije prošlo, ...). Te osobine ponovo zahtijevaju kompatibilnost primjenjenih programa
u određenoj aplikaciji.
Primjenjeni programi u PC-baziranim MV
sustavima najčešće su kreirani na jedan od slijedeća tri pristupa:
1. koristi MV biblioteke
sa custom kodom razvijenim koristeći
Visual C/C++, Visual Basic ili Java.
U zadnje vrijeme to je efikasan alat; biblioteke moraju biti razvijene
za sve primjene; taj način nije prigodan za
krajnje korisnike, već za proizvođače i sklapatelje sistema.
2. koristi grafičko
programersko okruženje koje koristi ikone za predstavljanje MV i
ostalih control/display funkcija.
Može biti lakše za učenje i razvoj; nije originalno razvijeno za industrijski
MV, nego generalno, za usmjereno
prikupljanje podataka; to omogućuje blokovno slaganje MV sistema i analizu
pojedinih blokova ili elemenata koji
su problematični i čine značajne probleme pri slaganju kompletnog MV sistema.
3. koristi konfiguracijske
primjene programa za MV.
Koncept konfiguracijskog MV primjenjivog
programa je da osigura proizvođačima uređaja, sklapateljima sistema i
krajnjim korisnicima da samo klikom definiraju funkciju MV
sistema; to je sposobno i za mnoge osnovne MV
primjene, ali ne i za sve; to su zajedničke
potrebe jednog automatiziranog proizvođača opreme i
sklapatelja sistema kada implementiraju MV.
Povratak na SADRŽAJ
MV počinje sa slikom. Ti problemi, povezani s kvalitetom slike u MV, slični su problemima povezanim s kvalitetom fotografske slike.
Razlozi upotrebe kvalitetnog osvjetljenja, kao i opis leća i senzora spomenuti su već ranije, pa da ih samo ponovimo neke osnovne značajke.
Razni tipovi osvijetljenja također mogu utjecati na kvalitetu slike. Npr., florescentno osvijetljenje u svom spektru ima veći udio plavog od inkandescentnog osvijetljenja.Osim toga, spektralna osjetljivost oka je veća na plavi dio spektra, dok je infracrveni dio spektra kompatibilnij (bolji) sa spektralnom osjetljivošću "solid state" senzora koji se primjenjuju u MV-u.
Kao što uočljivost prilikom ljudskog nadziranja može biti poboljšana "mekim" osvjetljenjem ili florescentnim lampama (punjenim plinovima koji osiguravaju veći udio crvenog u spektru svjetla lampe), to može biti i za slučaj MV-a. Spektar svjetla lampe može uzrokovati kontrast povezan sa specifičnom osobinom koja se analizira.
Kao i kod fotografije MV, upotebljava veće leće za "hvatanje" slike objekta i fokusiranje na površini senzora. Kao što je već spomenuto, kvaliteta leća utječe na kvalitetu slike. Izobličenja i aberacije mogu utjecati na količinu značajki u prostoru slike. Rasipanje u lećama može utjecati na razdiobu svijetla po slikovnom prostoru. Povećanje leća mora biti u skladu sa primjenama. Slika objekta mora prekriti slikovni prostor senzora što je moguće više. Tolerancije su dozvoljena za svako uočavanje pogreške povezano s pozicijom objekta i ponavljanjem te pozicije. Fokus leće i otvor blende mora biti otimiziran da održava dubinu polja koji je povezan sa objektom.
Senzor slike korišten u MV-u je taj koji određuje granice odbacivanja detalja koji ulaze u sustav. Slikovni senzor ima konačan broj diskretnih detektora i to će ograničiti širinu (veličinu) podatkovnih elemenata koji se mogu prenijeti (što će reducirati sliku).
Tako i najmanji dio podataka (informacije) koji se odstrani, biti će funkcija ispuštenog pogleda. Jednostavan primjer može biti prikazan na običnoj fotografiji: kada se zauzme panoramski pogled za slikanje udaljenih planina, obitelj koja stoji u podnožju planina majčešće neće biti primjećena. Drukčije, ako koristimo druge leće i približimo se obitelji, tada se može uhvatiti izraze lica pojedinih članova obitelji, ali rezulitrajuća slika neće uključivati i vrhove planina.
Ako primjene zahtijevaju 1-inčno polje pogleda i senzor sa uređajem veličine od 500 podatkovnih točaka koji je korišten, tada je veličina podatkovne točke oko 0.002 inča po strani. Mogućnost MV-a da smanuje detalje je generalno bolja nego promjena veličine prostorne podatkovne točke.
Na način kako može ljudsko oko vidjeti zvijezde na nebu noću zbog kontrasta svijetla, tako postoje MV tehnike koje dopuštaju sistemu da odbacuju detalje koji su manji od prostornog podatkovnog elemenata (piksela). Kontrast je tu kritičan. Zahtjev za podpikselnu osijetljivost varira od proizvođača do proizvođača, i ovisi o izradi i primjeni.
U svim dijelovima MV sistema, do sada objašnjenim, informacija o slici je bila u analognom formatu. Da bi računalo moglo obrađivati sliku, analogna slika mora biti digitalizirana. Ova operacija sadržava sempliranje na diskretnim pozicijama analogno analognom signalu što podudara grafu osvijetljenja u odnosu na vrijeme kvantiziranja svijetline u toj točci (pikselu).
Trenutačna svijetlina ovisi o osvijetljenju, relativnom sadržaju objekta, stanju u atmosferi između osvijetljenja i objekta, te objekta i kamere, specifičnoj osjietljivosti detektora u slikovnom osijeetilu (kameri). Mnogi MV sistemi karakteriziraju svijetlinu sa vrijednošći između 0 i 255. To je generalno bazirano na nivo sivoga (shade of gray).
Današnji MV sistemi uglavnom su monokromatski. Time boja može biti važan faktor o veličini svijetline. Npr., moguće je imati sjene crvene ili sjene zelene na slici koje imaju istu veličinu svijetline. U mnogo slučajeva gdje imamo potrebu za bojom, filteri su korišteni kako bi eliminirali boje koje nisu interesantne za pojedinu primjenu. U tom slučaju nivo sivog je indikator nivoa zasićenja vezan za pojedinu boju.
Sada imamo sliku koja je pripremljena za računalo. U mnogim MV sistemima digitalizirana slika je spremljena u memoriju koja je razdvojena od računala. Ova memorija naziva se spremnikom slike (frame grabber), gdje je frame izraz korišten kod televizije, a sinonim je za jednu sliku. U nekim slučajevima to sklopovlje koje ima ulogu spremanje framea, ujedno uključuje i anlogno-digitalnu pretvorbu i ostalu elektroniku. To omogućuje da se slika vidi nakon određenih koraka procesiranja, (da se vide efekti procesiranja).
Računalo može sada obrađivati sliku. To se generalno misli na procesiranje slike. U naknadnim operacijama na slici, računalo se koristi za analizu slike, donosi odluku o slici, i izvršava sukladnu operaciju. Ono što se tipično odnosi na MV sisteme je kombinacija slikovno procesirajuće , analizirajuće i odlučivačke tehnike koje su uključene u računalo.
Dobra analogija se može napraviti i za toolbox. Danas svi MV sistemi uključuju nekakve osnovne alate, kao što su npr. čekić, izvijač i sl. osnovni u alatnoj kutiji. Iza toga, različiti proizvođači su razvili odgovarajuće alate, najčešće vođeni specifičnim slučajevima primjena. Zato, objašnjenja koja su najčešće data za MV, kao npr. "idiotski stručnjak" (idiot savant), jako su prikladna. Tako, mnoge platforme su odlične za neke vrste primjena, ali nisu optimalne za druge primjene.
Važno je odabrati vizuelnu platformu ili toolbox sa mnogim prilagođenim alatima za primjenu. Ne postoji danas ni jedan MV sistem koji dolazi u dodir sa širokim mogućnostima slikovnog razumijevanja koje imaju ljudi. Za mnoge primjene, različiti alati će zaista obaviti posao, bez žrtvovanja performansi. S druge strane, u nekim slučajevima performanse mogu biti marginalne (minimalne).
Procesiranje slike generalno se vrši na slici iz dva razloga: da poboljša sliku u svrhu lakšeg i boljeg donošenja određene odluke povezane sa slikom, i druga je da segmentira sliku ili da izdvoji bitne značajke od nebitnih.. Poboljšanje može biti izvedeno, na primjer da ispravi neuniformnosti u osjetljvosti od foto-sloja do foto-sloja u senzoru slike, za ispravak izobličenja, ispravak neuniformnosti osvijetljenja, poboljšanja kontrasta scene, ispravak perspektive, itd.
Ti koraci poboljšanja mogu biti jednostavni poput dodavanja ili izvlačenja specifičnih vrijednosti za svaki nivo sivog ili mogu uvesti logičke operacije u obradu slike. Postoje mnogo takvih načina (rutina). Jedan takav način često upotrebljavan kao alat za obradu slike je histogram. On prikazuje relativnu pojavu nivoa sivog na slici.
Jedna od upotrebe histograma je da poboljša kontrast. Npr., histogram je matematički redistribuiran tako da su pikselima pridjeljeni nivoi sivoga od 0 do 255. U slici s takvim načinom poboljšanja kontrasta bit će lakše postaviti granice ili odrediti specifični nivo sivoga ili praga koji se upotrebljava za binariziranje slike. Binariziranje slike ili segmentacija slike bazirana na pragu iznad kojeg su svi pikseli "1" i ispod kojeg su svi "0" je konvencijonalni segmentacijski alat uključen u većini MV platforma, koji je efektivan tamo gdje postoji visoki kontrast .
Tamo gdje kontrast u slici nije stalan, segmentacija bazirana na rubovima je pogodnija. Rubovi mogu biti karakterizirani kao mjesta gdje postoji promjena gradijenta sivih tonova. I gradijent i smjer promjene mogu biti upotrebljeni za karakterizaciju ruba. Značajni rubovi mogu biti uzrokovani sjenama i reflekcijskom promjenama na površini, u vezi s granicama samog objekta. Sadržaj same slike može također doprinjeti određivanju rubova. Npr., neželjena poroznost može također doprinjeti poboljšanju karaktrizacije rubova.
Mnogo je razilčitih načina za određivanje rubova. Jedan od najjednostavnijih načina je pomoćo velikih promjena sivog koji se javlja na mjestu gdje postoji rub. Bilokako, rubovi se pojavljuju preko nekoliko susjednih piksela, pa je u vrijednosti piksela princip određivanja ruba preko piksela. Zbog toga, postoje načini da se matematički diskriminira fizička pozicija ruba na vrijednosti manje od veličina piksela. Opet, postoji puno mogućnosti da se izvedu ti proračuni (tzv. subpixel calculations), a rezultati su ovisni o aplikaciji. Stoga je vazno voditi računa o tome da karakteristike dane aplikacije mogu reducirati učinkovitost upotrijebljenih tehnika (tzv. subpixelling techniques).
Nakon što obavi rutine obrade slike u svrhu poboljšanja i segmentiranja,
računalo sada vrši analizu slike. Specifičnosti provođenja analize jako
ovise o aplikaciji. Na primjer, u navođenju robota na segmentiranoj slici
tipično se provodi geometrijska analiza.
Obzirom na prag ili rub segmentirane slike moguć je izračun centralne
vrijednosti i proslijeđivanje robotu kao koordinate na kojoj treba, npr.
pokupiti određeni objekt.
U slučaju upotrebe MV sustava za provođenje određenog tipa nadzora (inspekcije),
postoje stotine raznih tipova tehnika analize.
Broj piksela povezan s binariziranom slikom, ili pragom slike, može
se, npr. prebrojiti, te upotrijebiti kao relativno jednostavna mjera cjelovitosti
objekta. Može se brojiti broj prijelaza piksela iz crnog u bijelo i udaljenost
između prijelaza te upotrijebiti za mjerenje granica objekta. Može se brojiti
i broj piksela povezanih s rubom. Vektori povezani sa smjerom gradijenta
na rubu mogu biti upotrijebljeni u svrhu analize (model baziran na
rubovima može biti izveden tamo gdje rubovi mogu biti karakterizirani kao
vektori određenog smjera i duljine). Geometrijske značajke mogu biti "izvučene"
iz poboljšane slike i upotrijebljene kao osnove odlučivanja.
Te iste tehnike mogu biti upotrijebljene u aplikacijama vezanim uz prepoznavanje uzoraka. U svakom slučaju uzorak može biti definiran pomoću ekstrakcije jedne ili više, već ranije spomenutih značajki slike. Npr., kombinacija broja prijelaza i rubnih piksela može biti dovoljna za donošenje suda o uzorcima, odnosno da razluči između uzoraka. Drugi pristup može biti korištenje geometrijskih osobina za razlučivanje uzoraka. To može uključivati duljinu, širinu, omjer širine i duljine ,...
Jednum kad je računalo reduciralo sliku na skup značajki upotrijebljenih kao osnovu analize, ono tipično upotrebljava deterministički ili vjerojatnosni pristup za analizu tih značajki. Vjerojatnosni pristup je onaj koji sugerira da davanjem određene osobine povezane sa značajkom, postoji velika vjerojatnost da je objekt u stvari dobar. Tako, npr., upotrebljavajući konačni broj piksela kao indikaciju kompletnosti objekta, velika je vjerojatnost da, ako ukupni broj piksela prekorači 10000, je objekt kompletan. Ako je manje od 10000 onda objekt mora biti odbačen jer je karakteriziran kao nekompletan. Neki uzimaju to kao vrlo dobar kriterij. Ujedno je moguće postaviti granicu oko tog kriterija, tj. vrijednost treba pasti između npr. 10000 i 10500. Indikacija broja piksela većeg od 10500 može biti npr., indikacija prejakog bljeska.
Deterministički pristup je onaj koji upotrebljava fizičke osobine kao kriterij. Npr., ako je udaljenost između dvije granice jedan inča +/-0.005", ili ako opseg objekta mora pasti između 12 inča +/-0.02". Uzorak mora odgovarati određenom kriteriju da se smatra odgovarajućim (npr. odnos dužina/širina, opseg, itd. mora odgovarati određenoj vrijednosti).
U determinističkom modu svaka od značajki može biti povezana s vektorom u prostoru odlučivanja. U primjenama prepoznavanja uzoraka, kombinacijom vektora ili najmanje udaljenosti s poznatim skupom značajki za svaki uzorak odlučuje se koji uzorak treba biti izabran. Taj način razvoja povezan je s teorijom odlučivanja. Drugi način analize je onaj baziran na sintaktičkim tehnikama. U tim slučajevima, primitivi povezani s djelovima slike su izdvojeni i veza između njih je uspoređena s poznatom bazom podataka slike.
Drugim riječima, primitivi i njihove međusobne veze moraju poštivati skup pravila. Upotrebljavajući sintaktičke tehnike, jedna bi mogla zaključivati određene primitive i njihovu poziciju znajući nešto o drugim primitivima na slici i njihovoj poziciji, međusobno se poštujući. To bi mogla biti tehnika za nadziranje djelova koji se možda prekrivaju, a još uvijek bi bila u mogućnosti donijeti određene odluke u vezi s tim djelovima, iako neki nisu vidljivi u cijelosti.
Dostupno je mnogo MV alata i specifičnih alata uvijetovanih određenim primjenama. Danas se MV tehnologija može naći praktički u svakoj proizvodnoj industriji. Njaveći usvajač te tehnologije do sada je elektronička industrija. U mikro elektronici MV tehnike su upotrebljene za automatsku provedbu inspekcije procesa proizvodnje integriranig krugova (proizvodnja foto maski, ..., inspekcija gotovih kućišta za prodaju).
Povratak na SADRŽAJ
Kroz proces proizvodnje (ručne), machine vision se koristi kao povratna veza, kako bi vratio podatak o korekciji proizvodnje u različitim procesima proizvodnje, kao die-slicing povezianje i povezivanje žicom. U industriji makroelektronike, se koristi kako bi nadzirao topologiju štampanih veza, savršenosti izvedbe, nadziranje smještanja komponenti i njihovo slaganje. MV se još koristi kao povratna veza u svezi sa smještajem komopnenata. Postao je sastavni dio proizvidnog procesa povezan sa smiještanje nosača čipova sa relativno mnogo pinova koji su gusto smiješteni.
U industriji koja proizvodi tzv.“beskrajne uzorke”, kao što su industria papira, plastike i tekstila, tehnike MV-a se koriste za vršenje nadziranja cjelovitosit proizvoda. Gdje je potrebno prekrivanje proizvoda tu se isto koristi MV kako bi osigurali prekrivanje i kvalitetu prekrivanja. U tiskarskoj industriji MV se koristi u svezi registracije.
U industriji hrane MV se koristi u krajnjem procesu za nadziranje i sortiranje, kao što su sortiranje defektnih prozivoda (proizvodi kojima nešto fali, npr. po dimenzijama pre-veliki ili -mali proizvodi , ... ).
Na kraju pakiranja koristi se za utvrđivanje veličine i oblika proizvoda kao što su čokoladice i keksi, kako bi se osiguralo da pakiranjem stanu u svoj paket.
U industriji priozvoda široke potrošnje, MV je korišten u različitim primjenama. To uključuje utvrđivanje oznaka, kao što su utvrđivanje pozicije, kvalitete i korekcije oznaka. U farmaceutskoj industriji MV se koristi za vršenje verifikacije karaktera, kao što je verifikacija ispravnosti i cjelovitosti karaktera i slažu li se s datumom i lot kodom.
Autimobilska industrija koristi MV u raznim primjenama. To uključuje “gledanje” u zavarivanje i spajanje velikih površina metala, uključujući finalno spajanje auta; gledanje kvalitete farbanja, npr. sjaj; ispitivanje greške štampanja na površinama metala; utvrđivanje kompletnosti različitih slaganja od kugličnih ležajeva do prijenosa... ; ono je isto korišteno u svezi sa robotima za ostvarivanje vizualne povratne veze kod sealant (štancanja) aplikacija, pri aplikacijama montiranja vjetrobranskih stakla, ...
Industrija četkica za zube ,npr., koristi vision sistem za provjeru cijelosti četkica. Container industrija koristi MV tehniku široko: pri metalnim konzervama MV se koristi za ispitivanje kvalitete krajeva konzervi, dubinu prbačenih rubova...; konzerva se ispituje za unutarnja defektna stanja.
U industriji stakla, MV se koristi za ispitivanje sidewall greški, greški spajanja, dimenzija i oblika (npr. praznih boca). U tom slučaju, MV tehnika može upravljati sa 1800÷2000 objekata po minuti.
Povratak na SADRŽAJ
Povratak na SADRŽAJ